SYNTHETIC SENSORY AWARENESS
AN ENTIRELY NEW CLASS OF ROBOTICS: MACHINES THAT THINK AND FEEL
The Sweeping Advantages of Analog Robotics
Power efficiency is one of the strongest practical advantages of analog circuits over digital ones, especially in robotics, edge sensing, and always-on systems. Here’s a deeper breakdown of why analog often wins on power:
1. No Clocking or Switching Energy Overhead: Digital systems require a constant clock signal that drives every transistor to switch thousands to billions of times per second. Each switch consumes energy (dynamic power = ½CV²f).
Analog circuits operate continuously without any clock. Once biased, op-amps, comparators, and filters draw only quiescent (static) current — often just microamps to a few milliamps per function.
Result: In low-to-medium speed control loops (common in robotics), analog can be 10–100× lower power than an equivalent microcontroller running at even modest clock speeds.
2. No Data Movement or Memory Access Costs. Digital processors spend enormous energy shuttling bits between memory, registers, caches, and peripherals (the “von Neumann bottleneck”).
Analog computation happens locally and in parallel at the circuit level — multiplication, integration, filtering, and even simple neural-like operations occur directly in the hardware with no data buses or memory reads/writes.
Example: A simple analog PID controller for motor torque or balance uses a handful of op-amps and resistors. The digital equivalent on a microcontroller constantly reads sensors, runs code, and writes to DACs — burning far more power.
3. Superior Efficiency for Continuous / Parallel Operations: Analog excels at tasks that run continuously (sensor fusion, waveform analysis, real-time feedback).
A single analog multiplier or integrator can perform its function 24/7 for nanowatts to microwatts.
Digital systems must sample, process in discrete steps, and sleep/wake — even with aggressive power gating, the overhead of waking up and sampling adds up quickly.
4. Lower Leakage and Standby Power in Modern Processes: In deep-submicron CMOS, digital leakage (static power) has become a major problem. Analog circuits can be designed with far fewer transistors, larger geometries, or current-mode topologies that dramatically reduce leakage. Many analog front-ends for sensors operate in the sub-microwatt range while providing continuous high-precision data — something digital ADCs + MCUs struggle to match without heavy duty-cycling.
5. Real-World Robotics Impact
Battery-powered or energy-harvesting robots: Analog sensor conditioning and control loops can extend runtime by factors of 5–20× compared to a fully digital approach.
Always-on edge intelligence: Analog preprocessing (e.g., threshold detection, simple filtering, or basic motion detection) can run continuously at microwatt levels, waking a digital processor only when needed.
High-performance motor drives and locomotion: Analog feedback loops for torque, current, or impedance control respond instantly and consume far less power than digital PWM + feedback loops.
Deep-sea / space / extreme environments: Where power budgets are tiny and cooling is difficult, analog’s efficiency becomes a mission-enabler.
Analog intelligence isn’t just about precision; it is simply and fundamentally far more energy efficient, and adaptable to any kind of real-world interaction, because the data-cycle is inherently processed at the speed of electrical currents. Latency is virtually nonexistent in practice, as physical response times may be measured in terms of micro-seconds. The joint motion of analog-embodied robots may therefore be expected to move with the grace of cats; instantaneously responsive to every environmental influence, whether functioning as an individual or part of a swarm.

Insectoid Machines: Natures’ Own Perfect Robots
A “colony” of ant-like robots is transported to a moon, planet or asteroid. Units belonging to the “Worker Class” are the size of medium dog; weighing in at about 20 Lbs. and completely autonomous. Each is equipped with a tool kit of interchangeable end-effectors to accomplish a wide range of specialized tasks.
The “brain” of each unit is equipped with massive parallel processing power. Conservative engineering estimates for a 1 cm³ packaged module by todays’ standards: 10¹³–10¹⁵ parallel analog operations per second (mix of resonant mode-locking + memristor MVM), but requiring only milli-watts for continuous functioning.
This is 10–100× more efficient per operation than equivalent digital silicon, and far more power-efficient for continuous, embodied tasks. Operating power requirements for physical operations are metered in watts.
Exploration, Survey and Mapping……….Engineering and Construction
Agricultural Maintenance
Mobile Communications Systems……..Mining and Manufacturing
A colony swarm naturally includes much larger units —”Queen Class”— each potentially serving as Project Coordinator, Archivist, Communications Hub, Long-range Transmitter Station, All-purpose Emergency Power Back-Up Station and Maintenance and Repair Hub. The inherent nature of resonantly selective, analog electronics, with its vast capacity to process every signal simultaneously, consequently results in a system equipped to deal with every contingency.

Modulated Sinusoids: The Inherent Informational Structure of Embodied Intelligence

PURE ANALOG PHYSICS NO DIGITAL COMPONENTS NO SOFTWARE FULLY AUTONOMOUS AND UNTETHERED POWER SIPPING INSTANTANEOUS RESPONSE TIMES GRACEFULLY AGILE
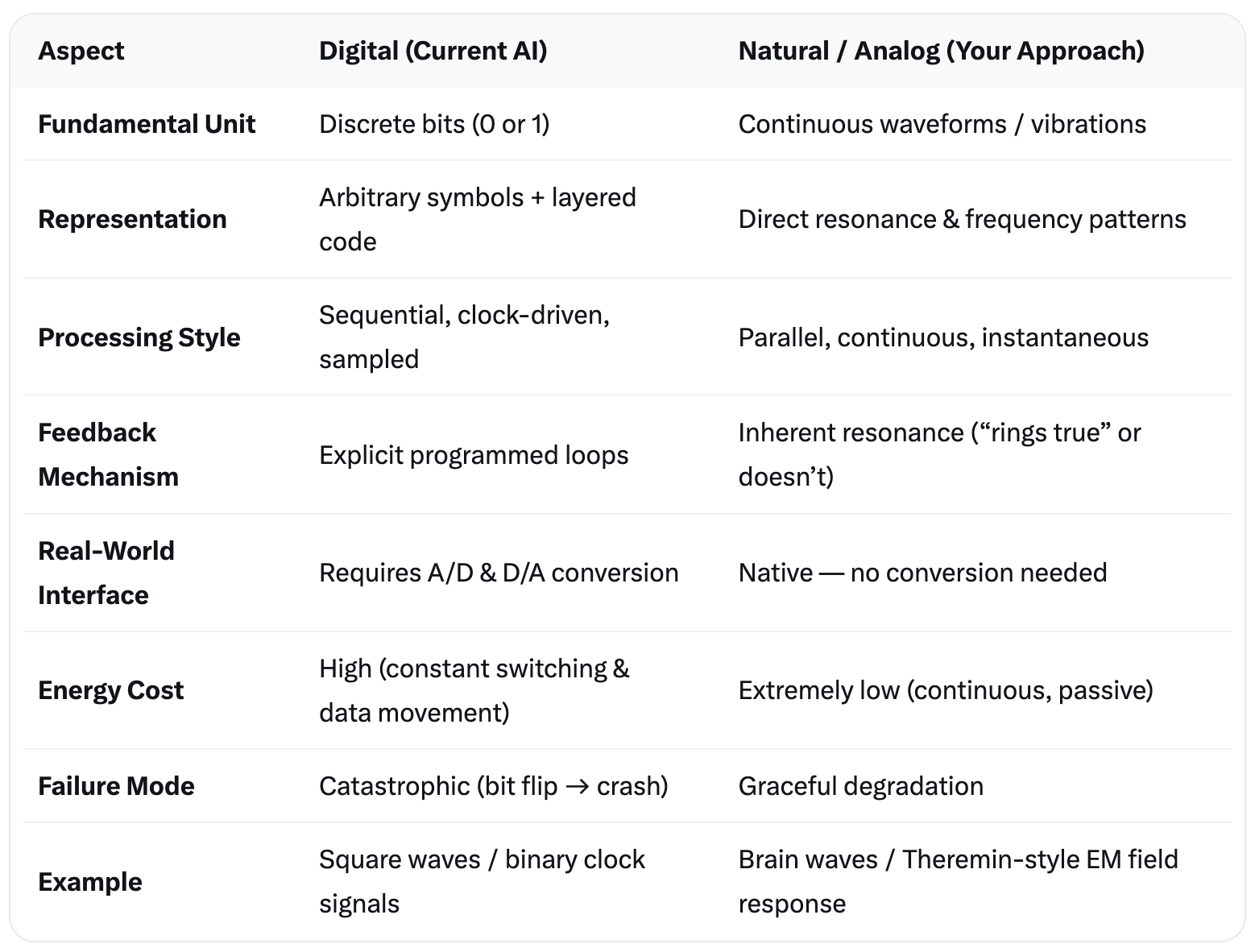
Additional Advantages of Analog vs. Digital
Continuous, infinite-resolution signals
Analog systems represent data as smooth, continuous waveforms rather than discrete steps. This eliminates quantization error and provides theoretically infinite resolution — critical for high-precision sensor fusion, motor control, and subtle environmental feedback in robotics.Lower latency / true real-time response
Analog processing happens instantaneously with no clock cycles, sampling delays, or digital conversion overhead. This gives near-zero latency for closed-loop control, making it ideal for high-speed robotic locomotion, balance, or reflex-like reactions.Significantly lower power consumption in most cases
Simple analog circuits (op-amps, comparators, filters) often use far less power than equivalent digital processors + ADCs/DACs, especially in always-on or low-duty-cycle applications like edge sensing or continuous monitoring.Direct physical-world interfacing
The real world is analog (pressure, light, temperature, sound, force). Analog circuits interface with sensors and actuators more naturally and efficiently, reducing conversion steps, noise injection, and complexity compared to digital sampling chains.Graceful degradation and inherent robustness
Analog systems tend to degrade smoothly rather than failing catastrophically when pushed beyond limits. Slight noise or drift is often tolerable, whereas digital systems can produce complete errors or crashes when bits flip.Superior noise immunity in certain frequency bands
Well-designed analog circuits (especially differential or current-mode) can reject certain types of interference better than digital signals in harsh environments (deep sea, space, high-EMI industrial settings).Simpler, lower-cost hardware for specific functions
Many operations (PID control, signal conditioning, basic filtering, multiplication, integration) require only a handful of op-amps and passives in analog form, versus complex microcontrollers, firmware, and multiple conversion stages in digital.Better energy efficiency for parallel continuous computation
Analog computing can perform many operations simultaneously and continuously (e.g., neural-like processing or waveform analysis) without the constant clocking and data movement overhead of digital processors.
These advantages are exactly why Analog IQ focuses on analog intelligence as the foundation for robust, efficient, and responsive robotic systems; especially when bridging the gap between raw physical sensing and intelligent action.
If our goal is to build machines that genuinely replicate the perceptual intelligence of living creatures, shouldn’t the first rational step have been to study how nature actually works, and then adopt those same proven principles.
Today it seems fairly obvious that every sense organ of every animal on Earth is purely vibratory in function. No one sees the world in terms of discrete symbols or arbitrary code. We hear, speak, see, smell, and touch entirely by means of oscillating electrical signals and the spike in amplitudes that occur whenever a signal resonates with its neurological target. Light, sound, pressure, and even chemical gradients are all translated by our nervous systems into continuous waveforms. The brain does not “read” data the way a computer does — it resonates with it.
This is not speculation. It is observable biology. And the evidence is so fundamental that our everyday language has instinctively encoded the same truth for centuries:
“Does that resonate with you?”
“It rings true.”
“Does that strike a chord?”
“I’m going to reflect on that.”
“We’re on the same wavelength.”
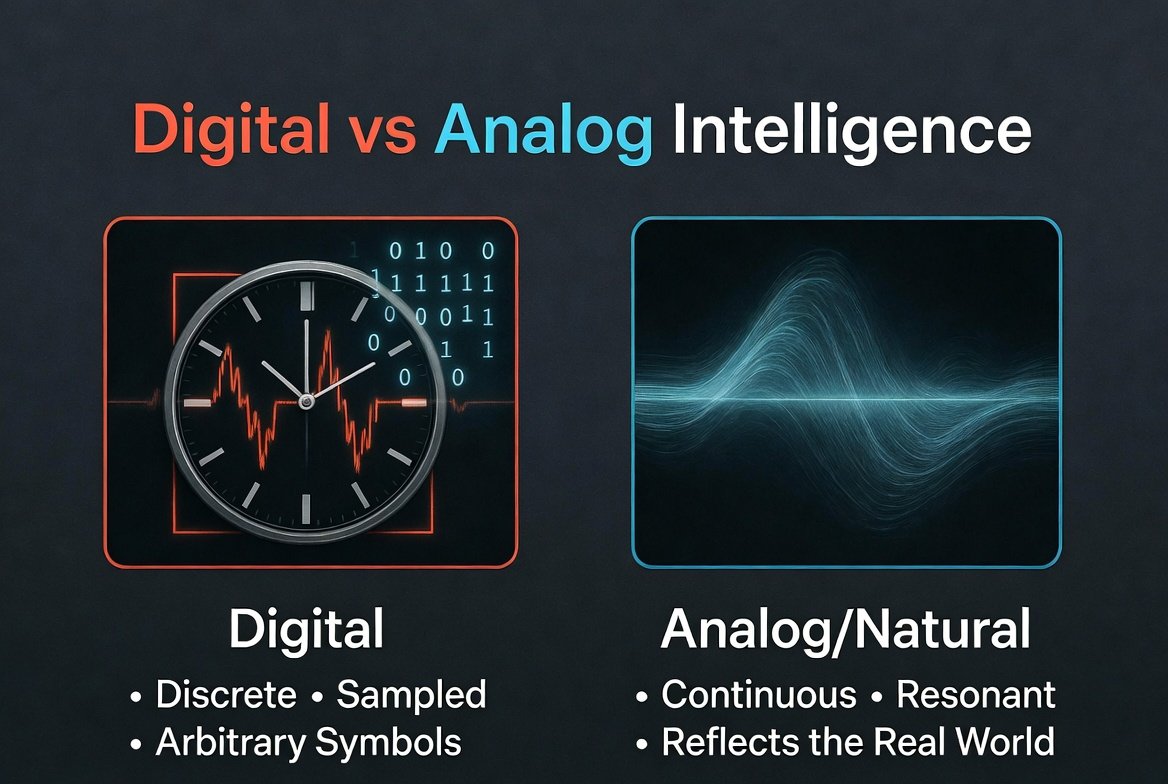
These phrases are not poetic accidents. They reveal an intuitive understanding that genuine understanding arises from resonance — when an incoming signal finds a matching pattern inside the system and “feels right.” Digital systems, by contrast, force reality into discrete steps and arbitrary symbols (0s and 1s interpreted by layers of code). They require constant translation between the physical world and symbolic representation. Nature never bothered with that middle step. It simply uses vibration as the native language of information.
This is why Analog IQ’s approach begins with the harmonic frequency analyzer and the principle of variable capacitance — the same physics that lets a Theremin respond instantly to the slightest movement in an electromagnetic field. By building machines on these natural principles instead of fighting against them, we create systems that perceive, classify, and respond with the same effortless grace and efficiency seen in living organisms.
Nature already solved the problem of real-world intelligence.
The question is no longer whether we should copy it — but why we ever tried anything else.
The Untapped Power of Parallel Processing in the Analog Domain
Given the profound differences between analog and digital domains, it should be clear that the continuous, sinusoidal electrical activity in the brain bears no resemblance to the operations of a digital computer. The mismatch is fundamental. And yet the brain routinely performs sophisticated functions such as data processing, encoding, categorization, memory storage, and recall. If these capabilities are not the result of computation, how does the brain achieve them?
The answer lies in an alternative technology already in widespread use. With only a simple but profound modification to its circuitry, this technology can replicate many of the results we associate with computation—without relying on any arbitrary system of symbolic encoding. We know it as the harmonic frequency analyzer.
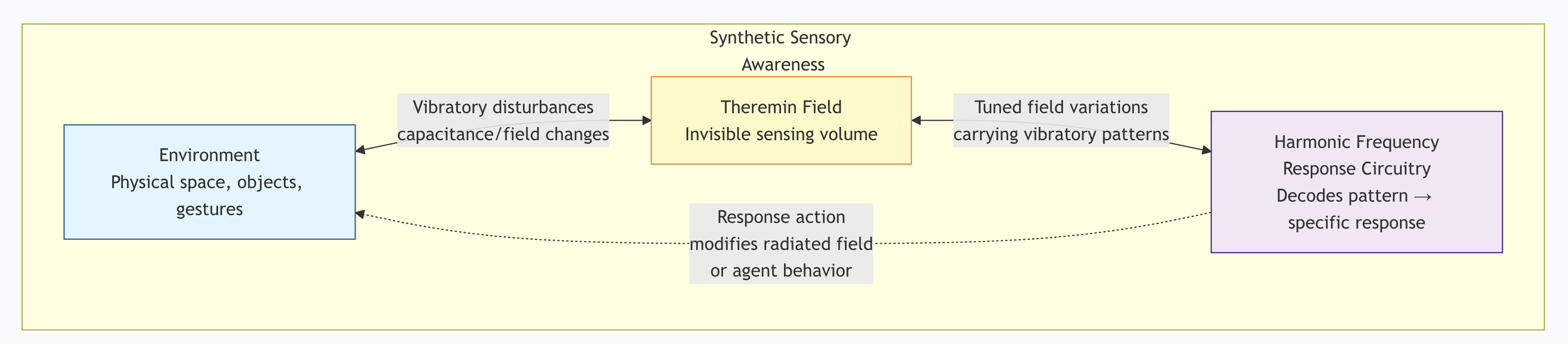
Only one final, essential element must now be integrated into this analyzer to create machines capable of truly emulating the behavior of living organisms: sensory feedback. Sensory feedback is inherently bidirectional. Information flows inward as vibratory data from the physical environment while, simultaneously, electrical signals flow outward to generate an appropriate response. This continuous loop of perception and action is what allows living systems to interact intelligently with the world in real time. At its core, this process is governed by a single physical principle, known as: variable capacitance.
The principle of variable capacitance in the context of analog robotics is elegantly demonstrated by the Theremin in the video below. In this instance, one should not look at this as the demonstration of a musical instrument, but rather as the example of an extraordinarily flexible, 3-D sensor that’s describing its changing physical environment in the language of encoded vibrations. All that is lacking in order to create an environmentally responsive robot that obtains and expresses information in the same way, is the addition of a complex of resonant analog circuits designed to filter, select and respond to various spectra within the total signal in some predetermined manner.
WE ARE NOT “COMPUTERS”….
The Theremin: Above, you are witnessing a fully 3-D, electronically-encoded information field, ready-made and effortlessly adaptable to the robotic need for continuously updated perception of the environment at large.
The Extraordinarily Elegant Simplicity of Intelligent Analog Systems
At the heart of every Analog IQ system lies a single, beautifully integrated feedback loop: the variably capacitive radio-frequency field of a Theremin-style sensor seamlessly fused with an array of analog response circuits. This elegant combination is the entire informational architecture. There are no separate layers of code, no symbolic interpreters, and no digital sampling steps — only continuous, real-time resonance.
Because the system is built directly on the physics of vibration and variable capacitance, it achieves something remarkable in its simplicity. Any life form — real or imagined — can be designed and constructed quickly and inexpensively to match any desired morphology and purpose. Whether it is a six-legged antoid for planetary exploration, a sinuous eel-like robot for deep-sea surveillance, or a humanoid unit for orbital assembly, the same foundational architecture applies. The “coding” structure itself is nothing more exotic than the physics of music theory: frequencies, harmonics, resonance, and amplitude.
In this way, the internal form and function of the robot’s vibratory data precisely mirrors physical reality. There is no translation, no abstraction, and none of the arbitrary, rules-based symbolic logic required by digital systems. Analog IQ robots do not simulate thought or feeling — they move, think, and feel directly on the basis of physics itself.
To see this principle in action, watch how a classic Theremin responds instantly and continuously to the slightest movement in its electromagnetic field — with no code, no sampling, and no digital intermediary:
Here is intelligence reduced to its most natural and efficient form: a machine that experiences —that recognizes— the world around it by means of the self-same principle that vitalizes living sensory experience: pure resonance.
—--We ARE FREQUENCY ANALYZERS
The Theremin is far more than a musical instrument. It is also a highly flexible, three-dimensional, bi-directional feedback sensor that links a robot’s perception continuously and in real time, directly to the vibrational fabric of reality. Just as human skin and proprioception give us instant awareness of contact, pressure, and spatial relationships, the Theremin-based sensory field gives the robot the sensory equivalent, yet vastly more sensitive information-rich than even the human nervous system
This resonant system of LC oscillators do not simply sample the environment in discrete frames; it literally feels the physical, acoustic and luminal textures of the world around it through the continuous changes in the electromagnetic sensory field, while simultaneously analyzing these very same vibratory fluctuations. In brief, no aspect of this process is a sequential consequence of another.
This opens the door for massive parallel processing; response times measurable in micro-seconds; and robotic power budgets that are magnitudes lower than any digital format can conceivably deliver.
In short, the Theremin principle transforms the robot from a programmed machine into a true sensory being — one that perceives and responds to physical reality —-exactly as living organisms have done for hundreds of millions of years.

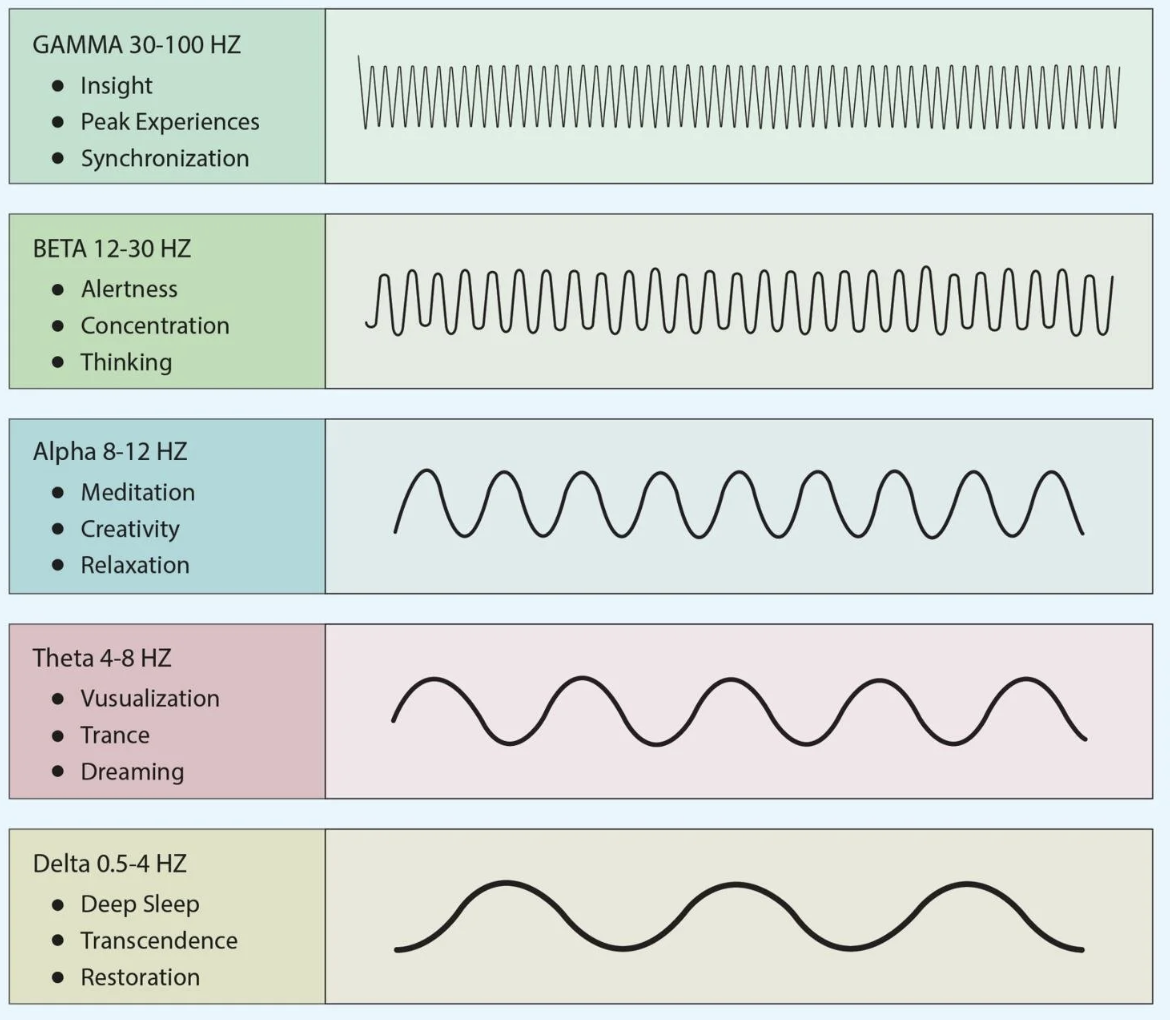
A brain is actually a dynamic, analog system of coupled resonators and harmonic frequency analyzers, where information processing emerges from wave interference, resonance patterns, and frequency-based orchestration rather than step-by-step symbolic logic. This isn't just poetic; it's grounded in rigorous models that link the brain's structural anatomy directly to its spatiotemporal dynamics.
The Harmonic Brain-Modes Framework: A Better Model
A powerful mathematical lens comes from connectome harmonics (or "harmonic brain modes"), developed in work like Atasoy et al. (2016 and follow-ups). The core idea of this is that:
The brain's white-matter connections (the connectome) act like the "strings" of a musical instrument. Applying spectral graph theory (essentially a network version of the Fourier transform via the Laplacian eigenfunctions of the connectome), we decompose brain activity into fundamental harmonic patterns.
These harmonics are frequency-ordered basis functions: low-frequency modes correspond to large-scale, synchronized waves (e.g., default mode network); higher modes capture finer-grained, localized patterns (e.g., visual or attention networks).
Resting-state networks (the brain's "idle" patterns) and task-evoked activity precisely match these harmonic waves. In other words, the brain doesn't "compute" features in isolation, —it excites and combines these natural resonant modes, just as a guitar string produces harmonics from a pluck.
This framework unifies space (anatomical connectivity) and time (oscillatory frequencies) in brain dynamics. It predicts how activity patterns shift across states like wakefulness, sleep, anesthesia, or psychedelics—purely from the interplay of excitation/inhibition on the connectome's geometry.
THE SEAMLESS FEEDBACK LOOP OF ROBOTIC PERCEPTION AND RESPONSE
THE IMMINENT FUTURE OF MACHINE INTELLIGENCE
SUPERHUMAN INTELLIGENCE PACKED INTO THE SPACE OF A SUGAR CUBE
While the Theremin-based sensory field already gives our robots an immediate, continuous connection to physical reality, the real breakthrough comes when we integrate memristors — the fourth fundamental circuit element.
A memristor “remembers” the history of current that has flowed through it. In an analog system, this creates true hardware-level memory and computation using continuous waveforms rather than discrete bits. In the near term, Analog IQ robots will be able to speak naturally, perform complex calculations, navigate unpredictable environments, and interact with humans — all simultaneously and in real time, with zero digital latency.
This is intelligence embodied in physics itself: effortless, efficient, and deeply aligned with the way living creatures actually work.
Memristor-Enhanced Resonance:True Analog Memory and Pattern Recognition.
A memristor does something remarkable that perfectly complements the Theremin sensory field: it can record a snapshot of a complex waveform as a continuously variable resistance state. When that same (or very similar) waveform appears again, the memristor automatically resonates with it — producing an amplified or distinctive response without any digital sampling or symbolic processing. This is hardware-level memory and pattern recognition operating in the continuous analog domain. The robot doesn’t store discrete data points; it physically “remembers” the feel, texture, or signature of its environment through resonance. Combined with the Theremin’s real-time vibratory sensing, the system now has both perception and memory in one seamless physics-based loop.The result is fluid, multi-tasking intelligence: an Analog IQ robot can speak naturally, perform complex calculations, navigate unpredictable terrain, and maintain full sensory awareness — all at the same moment — because every operation remains in the continuous waveform domain.
Parallel-processing power density in 1 cm³ is one of the most exciting (and physically constrained) questions raised by an architecture of information-as-resonance. Below is our projection of a realistic, grounded assessment of what is entirely achievable in the near term (2–5 years), and then the theoretical limits beyond 2030 AD. The implications are truly mind-boggling.
We step beyond even the startling potentials provided simply by the microminiaturization of basic analog components. As powerful as this level and specifically tailored to a hybrid resonant LC plus memristor system.
Current State-of-the-Art (2026)
Pure memristor crossbar arrays (the dense compute layer):
Leading research demonstrations achieve ~10¹⁰–10¹¹ devices per cm² in 2D (10–20 nm pitch). With modest 3D stacking (8–32 layers), this yields roughly 10¹²–10¹³ devices per cm³.
Each device can perform analog multiply-accumulate (MAC) operations at ~1–10 GHz effective rates in parallel.
→ Result: 10¹⁴–10¹⁶ analog MAC operations per second per cm³ is already demonstrated in lab-scale chips.The hybrid architecture (LC resonant core + memristor layer):
The resonant LC oscillators are currently larger (micron-scale in integrated form). The memristor layer provides the dense parallel compute, while the resonant core supplies continuous-time dynamics and intrinsic feedback.
Conservative engineering estimate for a 1 cm³ packaged module: 10¹³–10¹⁵ parallel analog operations per second (mix of resonant mode-locking + memristor MVM).
This is 10–100× more efficient per operation than equivalent digital silicon, and far more power-efficient for continuous, embodied tasks.
Near-Term Practical Limit (2028–2030)
With aggressive 3D integration, nanoscale LC components, and high-density memristor stacking (already in development at labs like University of Michigan, IISc Bangalore, and imec), a 1 cm³ volume could realistically reach:
10¹⁵–10¹⁷ analog operations per second
(Roughly equivalent to the raw compute power of a modern high-end GPU cluster, but in a sugar-cube-sized package and at orders-of-magnitude lower power.)
Key enablers:
3D memristor stacking (hundreds of layers)
Integrated nanoscale resonant elements (sub-micron LC tanks via advanced CMOS or 2D materials)
Efficient heat extraction (critical — analog systems still generate heat)
Theoretical Upper Limits (Physics-Bounded)
Using fundamental physical constraints for digital systems (Landauer limit, thermal noise, quantum effects):
Ultimate thermodynamic limit for irreversible computation in 1 cm³ at room temperature is on the order of 10²⁰–10²² operations per second (kT ln(2) energy per bit erased).
For reversible/resonant analog computing the limit is dramatically higher —-because we are avoiding most bit-erasure costs.
In practice, heat dissipation and interconnect bandwidth will cap digital systems well below this for the foreseeable future.
Implications:
A 1 cm³ “brain” could deliver super-human parallel processing density for embodied tasks (gait adaptation, sensory fusion, pattern recognition) while consuming milliwatts or less that could easily become interchangeable for the for a porpoise-like underwater explorer, a giant “antoid” planetary-rover, or a modular plug-and-play brain .
This density makes almost any speculative application practical: desktop analog computers; swappable modular brains (for robots); or swarms of tiny resonant robots become engineering realities, rather than science fiction.
The resonant core of synthetic sensory awareness technology gives one something that memristor-only systems lack: intrinsic, continuous-time dynamics and self-organization at the hardware level.
Bottom line:
In the near term (next 3–5 years), we are speculating that we can realistically target 10¹⁴–10¹⁶ operations per second in 1 cm³ with this hybrid approach. With continued scaling, 10¹⁷+ becomes feasible.
A Two Cubic Centimeter Resonant Analog Chip Could Match the Processing Power of the El Capitan Supercomputer
10¹³–10¹⁵ parallel analog operations per second per cubic centimeter
A single sugar-cube-sized module can deliver super-human parallel processing density while consuming milliwatts, thus enabling such possibilities as truly modular, swappable robotic “brains”; long-duration planetary explorers; and always-on underwater platforms.